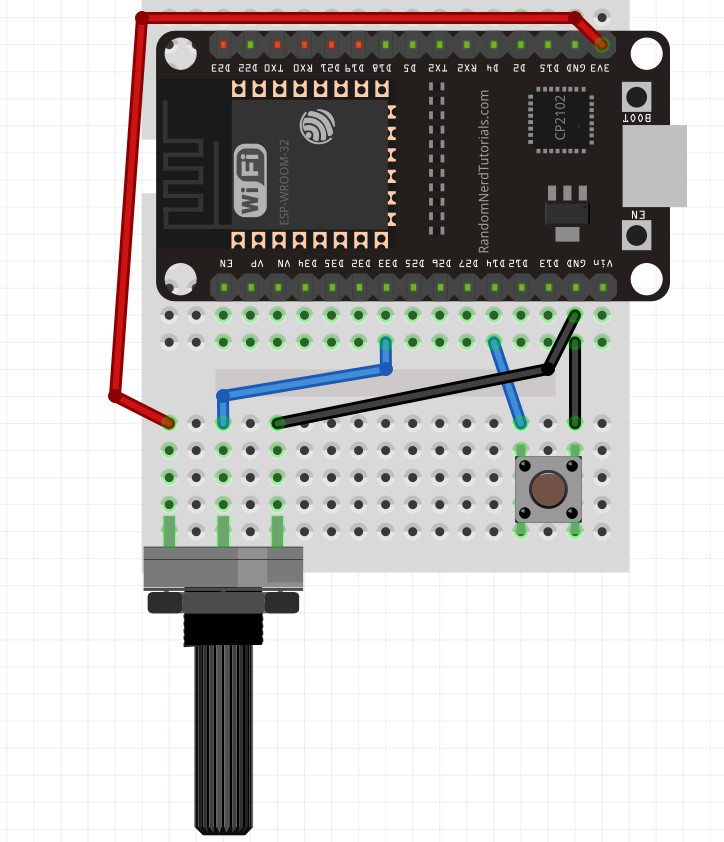
Let's plug in a button first so we have something to test.
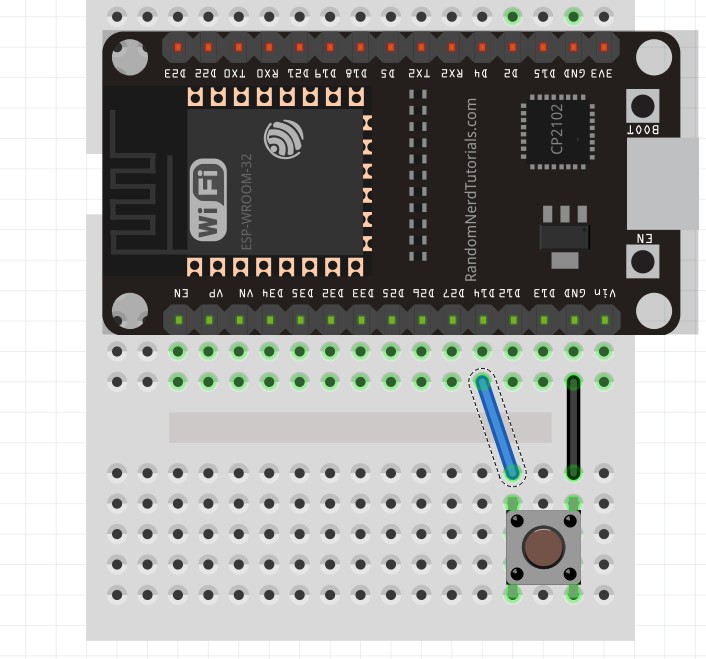
With this button, the left two pins are disconnected from the right two pins until the button is pushed, then they are connected.
So when the button is pushed we have a connection from D14 to GND.
Just like with outputs, there's two things we need to do.
pinMode(14, INPUT_PULLUP);
This sets pin D14 to INPUT mode, the PULLUP means that it's set to be usually HIGH. When we give it path to GND the 3.3v HIGH will flow away to GND and the pin will see 0v.
digitalRead(14);
This tells us what pin D14 can see, if it sees 3.3v then it will give us a "1", if it sees 0v then it will give us a "0".
Enter the following code, note that we need to use Serial to tell us what is happening, putting digitalRead(14) in the Serial.println() function will send that to us.
void setup() {
Serial.begin(115200);
pinMode(14, INPUT_PULLUP);
}
void loop() {
Serial.println(digitalRead(14)) ; // check pin 14/send to Serial
delay(10); // wait 0.01 sec
}
Now press the UPLOAD button, connect the Serial Monitor and see what happens when you push the button.